Ensure the accuracy of your stereo camera system with Foresight's DynamiCal™
As autonomous machines and vehicles rely on sensors to create a 3D perception of their environment, it’s crucial that cameras remain calibrated at all times to ensure accurate 3D images. Our Automatic Calibration solution uses a dedicated algorithm to assess relative pose estimation and enable continuous calibration, even while in motion, between pairs of vision sensors to maintain the highest level of accuracy.
Our technology compensates for decalibrations casued by slight movements, vibrations, and temperature changes. And with the ability to ensure continuous sensor calibration, including thermal infrared and visible-light cameras, you can trust that your vision sensors are always performing at their best.
Capabilities
Camera-relative pose estimation -Dynamic calibration for stereo systems
Compensates for deviation of external factors, such as small vibrations or temperature changes
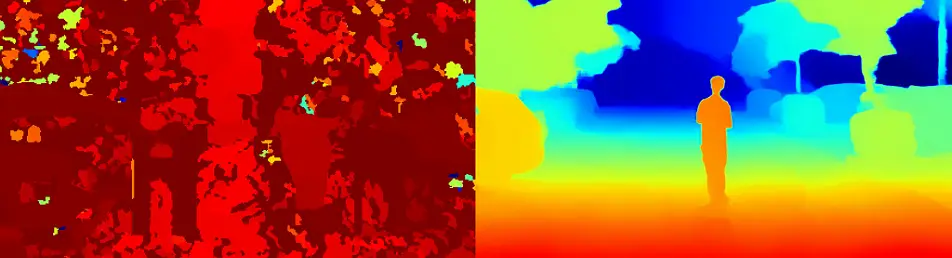
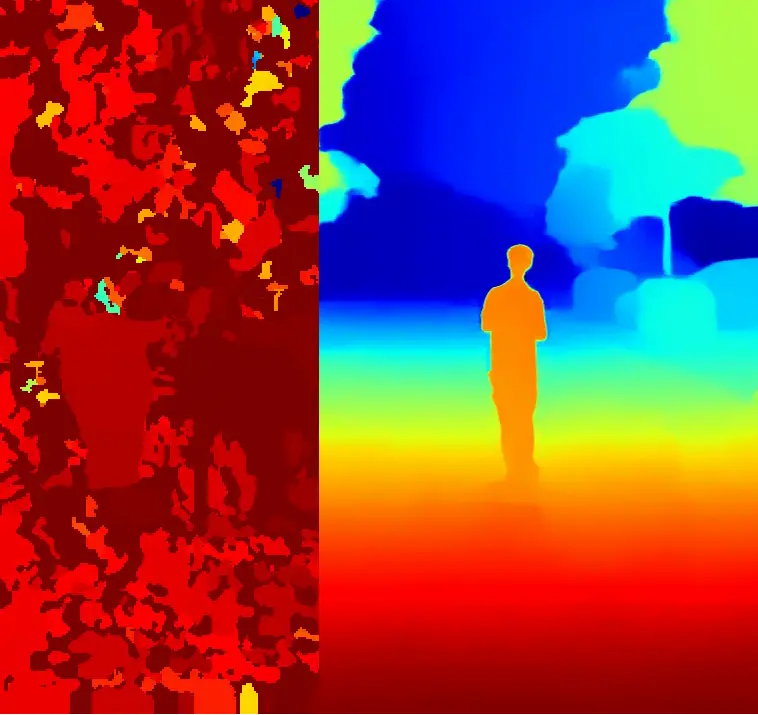
Enables high precision, accurate per pixel Percept3D™
Provides accurate and precise depth maps
Benefits
Fast Convergence Time
Supports dynamic corrections instantly
Optimized Utilization
Low processing computational power requirements on any standard hardware